数据结构大作业(关键路径)
丁致宇 202331060205 [TOC]
题目要求
-
活动优先图(AOE)的绘制: 根据给定的电影制作过程,绘制出反映各活动和时间需求的AOE图。该图将作为确定项目时间线和关键路径的基础。
-
关键路径分析: 通过分析AOE图,找出决定项目最短完成时间的关键路径。关键路径是项目中不可延误的活动序列,其总时长决定了整个项目的最短完成时间。
-
算法实现与结果输出: 实现一个算法来计算从项目启动到开始拍摄的最短时间。此外,算法还需输出关键路径上的具体活动。
-
效率分析: 分析所实现算法的时间复杂度和空间复杂度。
具体实现
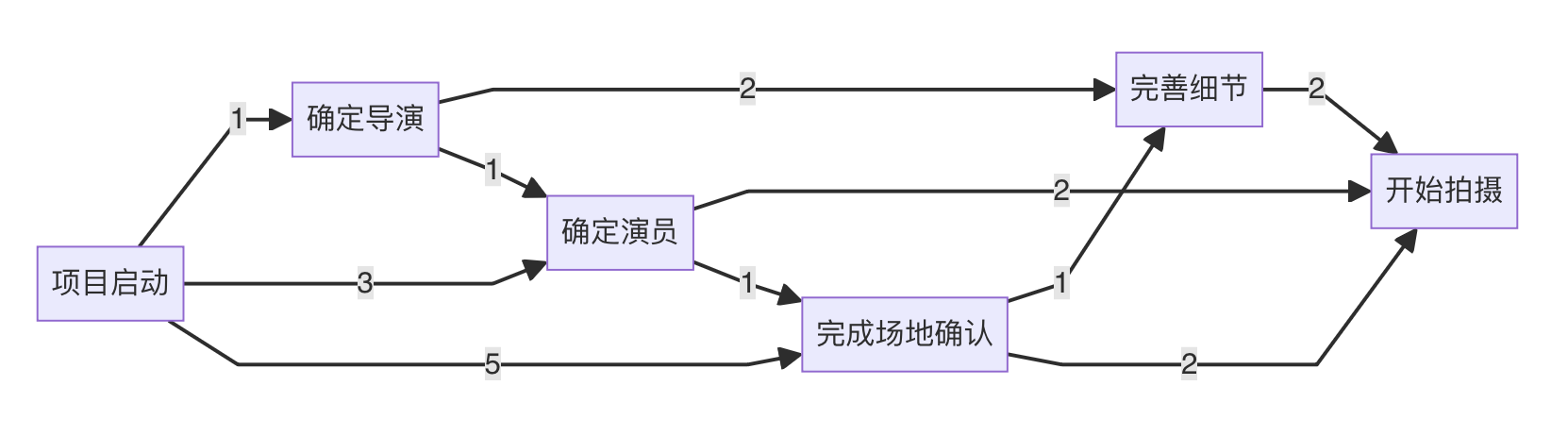
绘制AOE图
graph LR;
A[项目启动] -->|1| B[确定导演]
B -->|2| C[完善细节]
C -->|2| F[开始拍摄]
A -->|3| D[确定演员]
B -->|1| D
D -->|2| F
A -->|5| E[完成场地确认]
D -->|1| E
E -->|1| C
E -->|2| F
分析关键路径
- 0 (项目启动)
- 1 (确定导演)
- 2 (完善细节)
- 3 (确定演员)
- 4 (完成场地确认)
- 5 (开始拍摄)
根�据边的定义和权重,计算如下路径:
- 0 -> 1 -> 2 -> 5
- 0 -> 3 -> 5
- 0 -> 4 -> 2 -> 5
- 0 -> 4 -> 5
计算每条路径的总时长,以确定哪条是关键路径。
计算
- 路径 0 -> 1 -> 2 -> 5: 时间 = 1 + 2 + 2 = 5
- 路径 0 -> 3 -> 5: 时间 = 3 + 2 = 5
- 路径 0 -> 4 -> 2 -> 5: 时间 = 5 + 1 + 2 = 8 (最长路径)
- 路径 0 -> 4 -> 5: 时间 = 5 + 2 = 7
路径 0 -> 4 -> 2 -> 5 是关键路径,因为它具有最长的持续时间,为8个时间单位。任何在这条路径上的延迟都将直接影响整个项目的完成时间。
结论
"项目启动 -> 完成场地确认 -> 完善细节 -> 开始拍摄" 是关键路径
代码实现
- 构建图的数据结构 - 使用邻接表来表示图。
- 拓扑排序 - 为了确定活动的先后顺序。
- 关键路径法 - 计算最短完成时间。
#include <stdio.h>
#include <stdlib.h>
#define MAX_NODES 6 // 定义最大节点数
int indegree[MAX_NODES] = {0}; // 存储每个节点的入度
int earliest[MAX_NODES] = {0}; // 存储每个节点的最早开始时间
int latest[MAX_NODES] = {0}; // 存储每个节点的最迟开始时间
// 定义节点结构体
typedef struct Node
{
int vertex; // 邻接点编号
int weight; // 边的权重
struct Node *next; // 指向下一个邻接点的指针
} Node;
Node *graph[MAX_NODES] = {NULL}; // 图的邻接表表示
// 向图中添加边
void addEdge(int start, int end, int weight)
{
Node *newNode = (Node *)malloc(sizeof(Node)); // 动态分配节点内存
newNode->vertex = end; // 设置邻接点编号
newNode->weight = weight; // 设置权重
newNode->next = graph[start]; // 将新节点插入到链表中
graph[start] = newNode;
indegree[end]++; // 增加终点的入度
}
// 将节点编号转换为具体事件名称
const char *translateEvent(int vertex);
// 拓扑排序
void topologicalSort(int *sorted)
{
int queue[MAX_NODES], front = 0, rear = 0; // 使用队列实现拓扑排序
for (int i = 0; i < MAX_NODES; i++)
{
if (indegree[i] == 0)
{
queue[rear++] = i; // 将入度为0的节点入队
}
}
int index = 0;
while (front < rear)
{
int u = queue[front++]; // 出队一个节点
sorted[index++] = u; // 存储排序结果
for (Node *v = graph[u]; v != NULL; v = v->next)
{
if (--indegree[v->vertex] == 0)
{
queue[rear++] = v->vertex; // 若减少入度后入度为0,则入队
}
}
}
}
// 计算关键路径
void criticalPath(int *sorted)
{
for (int i = 0; i < MAX_NODES; i++)
{
int u = sorted[i];
for (Node *v = graph[u]; v != NULL; v = v->next)
{
if (earliest[v->vertex] < earliest[u] + v->weight)
{
earliest[v->vertex] = earliest[u] + v->weight; // 计算最早时间
}
}
}
for (int i = 0; i < MAX_NODES; i++)
{
latest[i] = earliest[MAX_NODES - 1]; // 初始化最迟时间
}
for (int i = MAX_NODES - 1; i >= 0; i--)
{
int u = sorted[i];
for (Node *v = graph[u]; v != NULL; v = v->next)
{
if (latest[u] > latest[v->vertex] - v->weight)
{
latest[u] = latest[v->vertex] - v->weight; // 计算最迟时间
}
}
}
printf("Minimum time to start shooting is %d time units.\n", earliest[MAX_NODES - 1]);
printf("Critical path includes:\n\n ");
for (int i = 0; i < MAX_NODES; i++)
{
int u = sorted[i];
for (Node *v = graph[u]; v != NULL; v = v->next)
{
if (earliest[u] + v->weight == latest[v->vertex] && earliest[u] == latest[u])
{
printf("%s --> %s\n", translateEvent(u), translateEvent(v->vertex)); // 使用事件名称输出关键路径
}
}
}
}
// 将节点编号转换为具体事件名称
const char *translateEvent(int vertex)
{
switch (vertex)
{
case 0:
return "Project Start";
case 1:
return "Confirm Director";
case 2:
return "Finalize Details";
case 3:
return "Confirm Actors";
case 4:
return "Complete Locations";
case 5:
return "Start Shooting";
default:
return "Unknown";
}
}
int main()
{
addEdge(0, 1, 1);
addEdge(1, 2, 2);
addEdge(2, 5, 2);
addEdge(0, 3, 3);
addEdge(1, 3, 1);
addEdge(3, 5, 2);
addEdge(0, 4, 5);
addEdge(3, 4, 1);
addEdge(4, 2, 1);
addEdge(4, 5, 2);
int sorted[MAX_NODES];
topologicalSort(sorted);
criticalPath(sorted);
return 0;
}
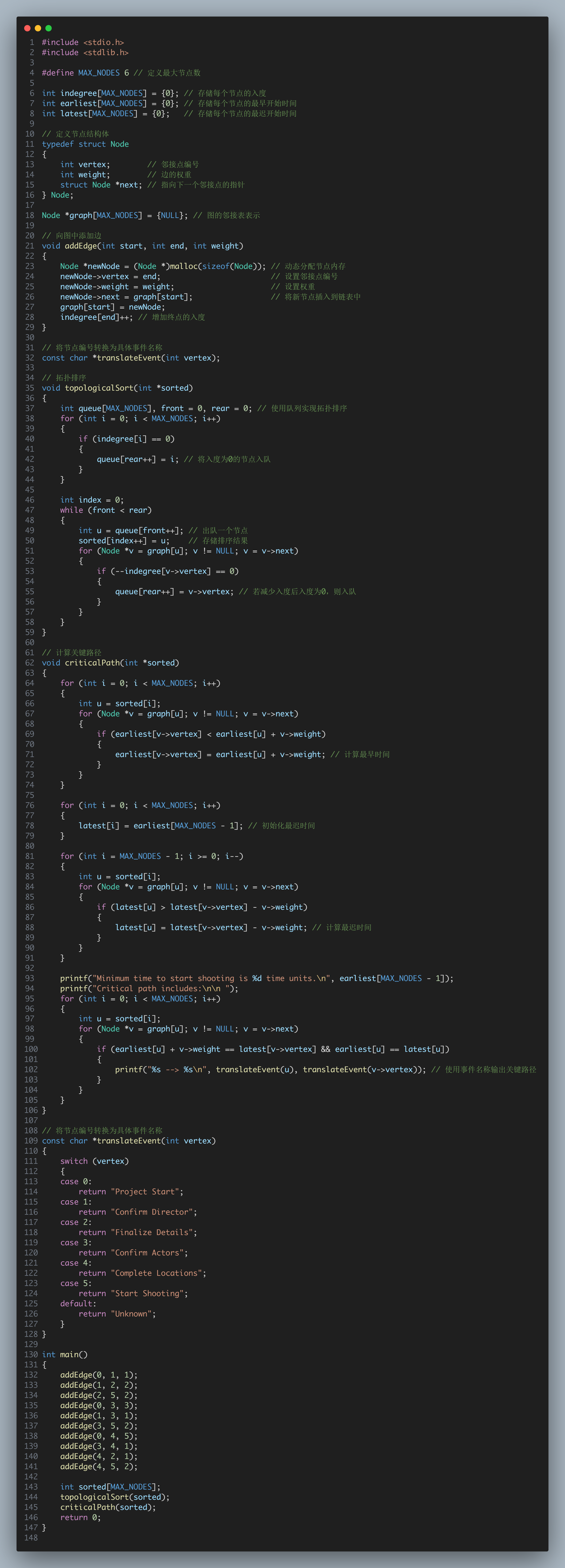
代码截图
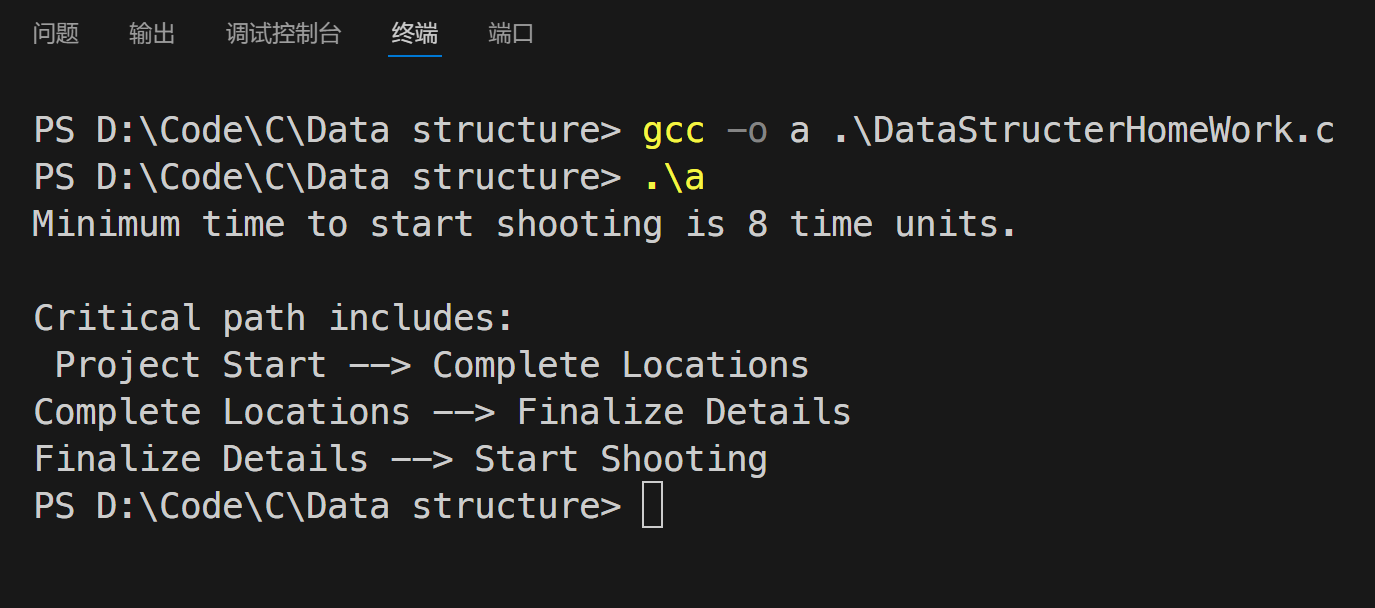
运行结果截图
效率分析
时间复杂度
-
添加边操作 (
addEdge): 每次调用addEdge函数的时间复杂度为(O(1))因为它只包括几个基本操作,如分配内存和更新邻接表。 -
拓扑排序 (
topologicalSort): 在拓扑排序中,每个节点都被放入队列中一次,从队列中出来一次,每个边也被检查一次。如果有( V )个节点和( E )个边,那么拓扑排序的时间复杂度是( O(V + E) )。 -
关键路径计算 (
criticalPath): 这部分涉及两次遍历所有的边和节点:一次是计算最早开始时间,一次是计算最迟开始时间。因此,这部分的时间复杂度也是( O(V + E) )。
综合来看,整个算法的时间复杂度为( O(V + E) )。
空间复杂度
-
邻接表: 使用邻接表存储图结构,对于每个节点,都有一个链表来存储连接的边。所以空间复杂度与节点和边的数量有关,为( O(V + E) )。
-
辅助数组: 如
indegree,earliest,latest, 和sorted,每个都占用( O(V) )的空间。 -
队列: 在拓扑排序中使用的队列,最坏情况下可以包含图中的所有节点,因此需要( O(V) )的空间。
因此,整个算法的空间复杂度主要由邻接表和辅助数据结构组成,总的来说是( O(V + E) )。